Mitigating non-Lambertian surfaces issues in Stereo Matching with Neural Radiance Fields
Depth estimation from images has long been regarded as a preferable alternative compared to expensive and intrusive active sensors, such as LiDAR and ToF. The topic has attracted the attention of an increasingly wide audience thanks to the great amount of application domains, such as autonomous driving, robotic navigation and 3D reconstruction. Among the various techniques employed for depth estimation, stereo matching is one of the most widespread, owing to its robustness, speed and simplicity in setup. Recent developments has been aided by the abundance of annotated stereo images, which granted to deep learning the opportunity to thrive in a research area where deep networks can reach state-of-the-art sub-pixel precision in most cases. Despite the recent findings, stereo matching still begets many open challenges, two among them being finding pixel correspondences in presence of objects that exhibits a non-Lambertian behaviour and processing high-resolution images. Recently, a novel dataset named Booster, which contains high-resolution stereo pairs featuring a large collection of labeled non-Lambertian objects, has been released. The work shown that training state-of-the-art deep neural network on such data improves the generalization capabilities of these networks also in presence of non-Lambertian surfaces. Regardless being a further step to tackle the aforementioned challenge, Booster includes a rather small number of annotated images, and thus cannot satisfy the intensive training requirements of deep learning. This thesis work aims to investigate novel view synthesis techniques to augment the Booster dataset, with ultimate goal of improving stereo matching reliability in presence of high-resolution images that displays non-Lambertian surfaces.
 Learning to Be a Transformer to Pinpoint AnomaliesIEEE Access, Jun 2025
Learning to Be a Transformer to Pinpoint AnomaliesIEEE Access, Jun 2025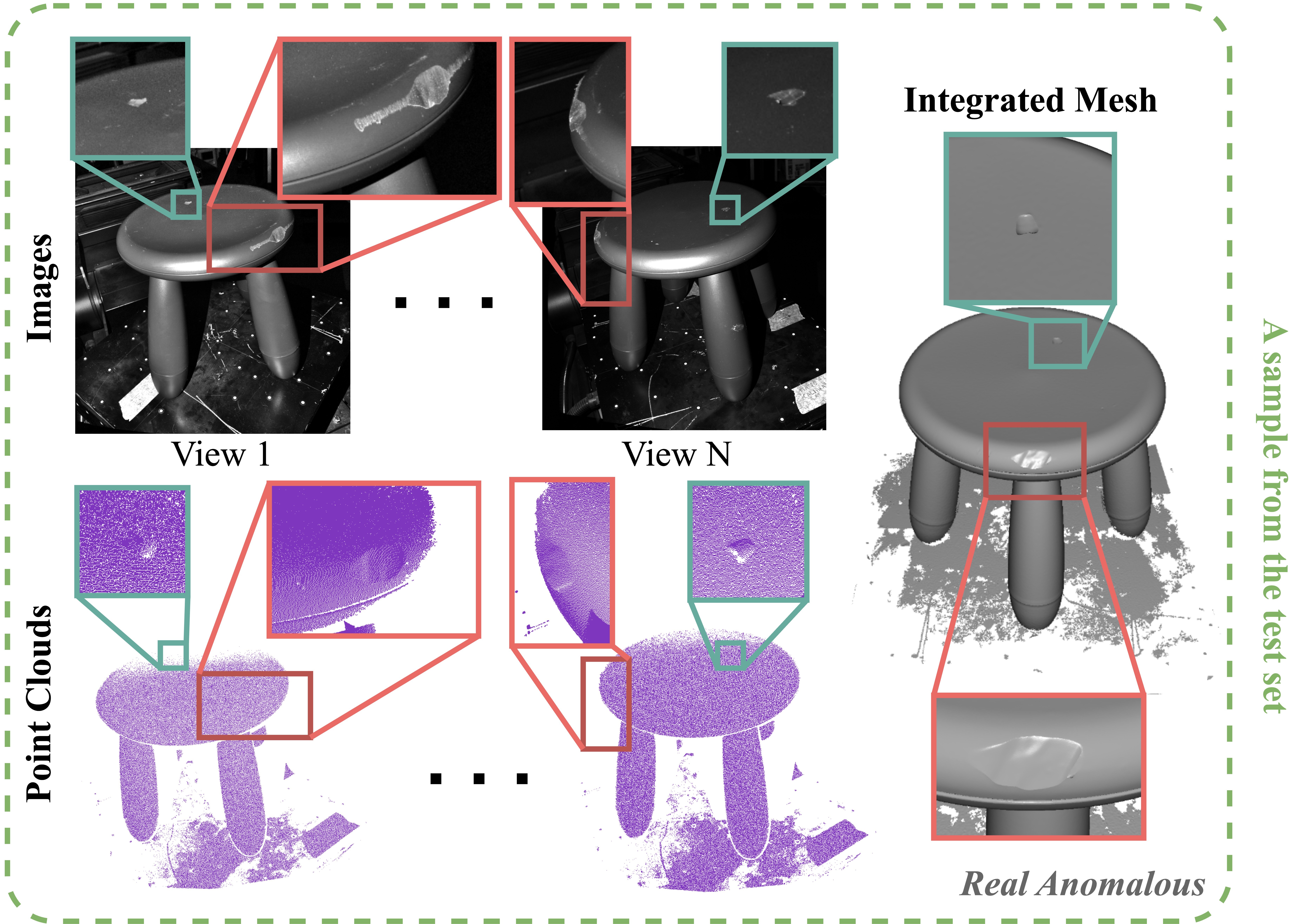 SiM3D: Single-instance Multiview Multimodal and Multisetup 3D Anomaly Detection BenchmarkIn International Conference on Computer Vision (ICCV), Oct 2025
SiM3D: Single-instance Multiview Multimodal and Multisetup 3D Anomaly Detection BenchmarkIn International Conference on Computer Vision (ICCV), Oct 2025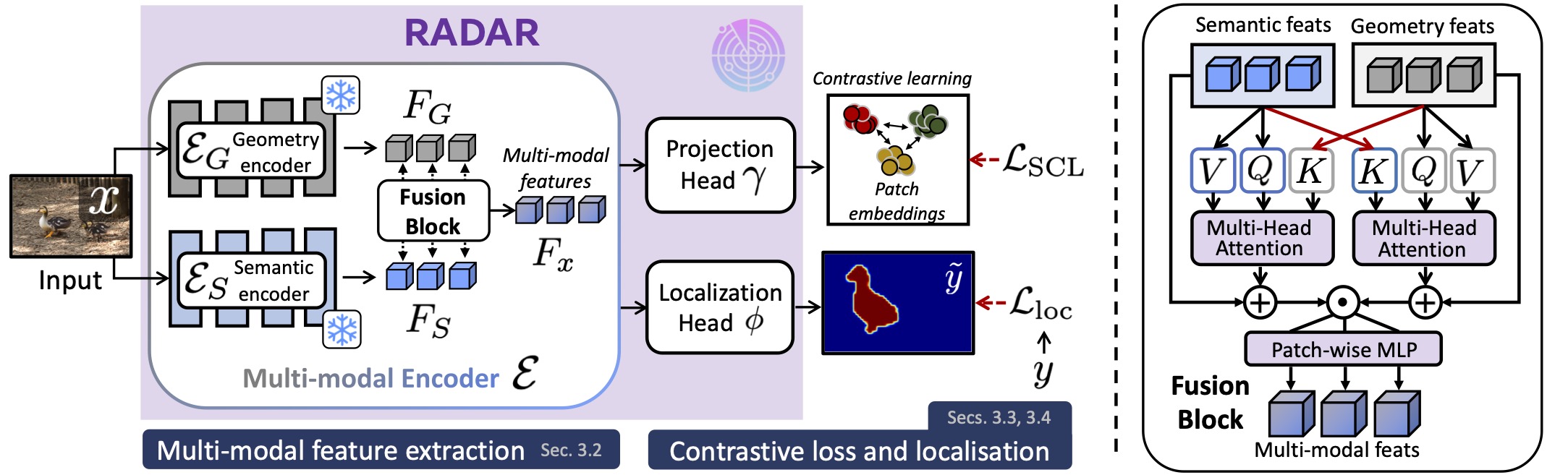 Towards Reliable Identification of Diffusion-based Image ManipulationsIn The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS), Dec 2025
Towards Reliable Identification of Diffusion-based Image ManipulationsIn The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS), Dec 2025


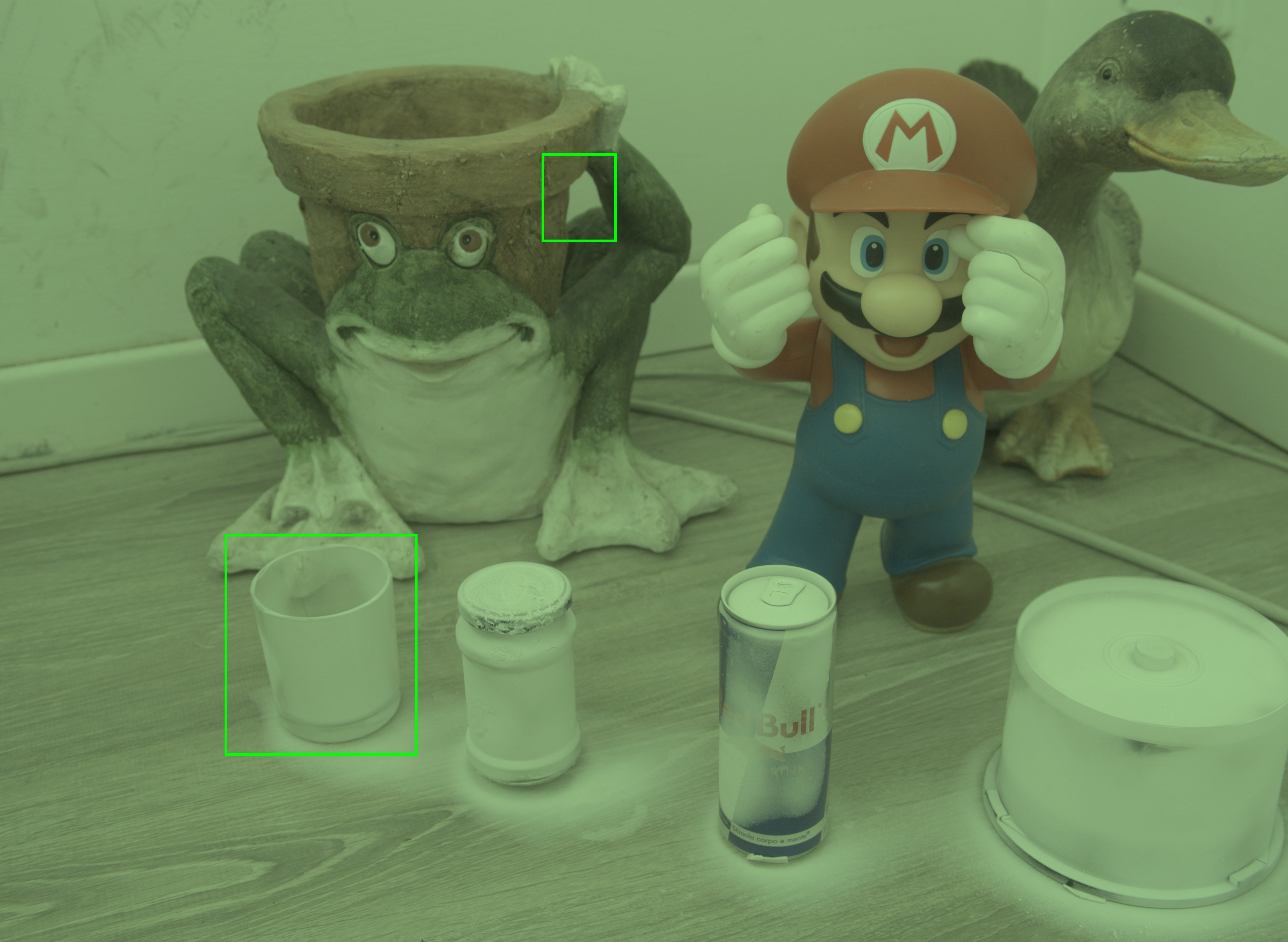
 Booster: A Benchmark for Depth From Images of Specular and Transparent SurfacesIEEE Transactions on Pattern Analysis & Machine Intelligence, Dec 2024
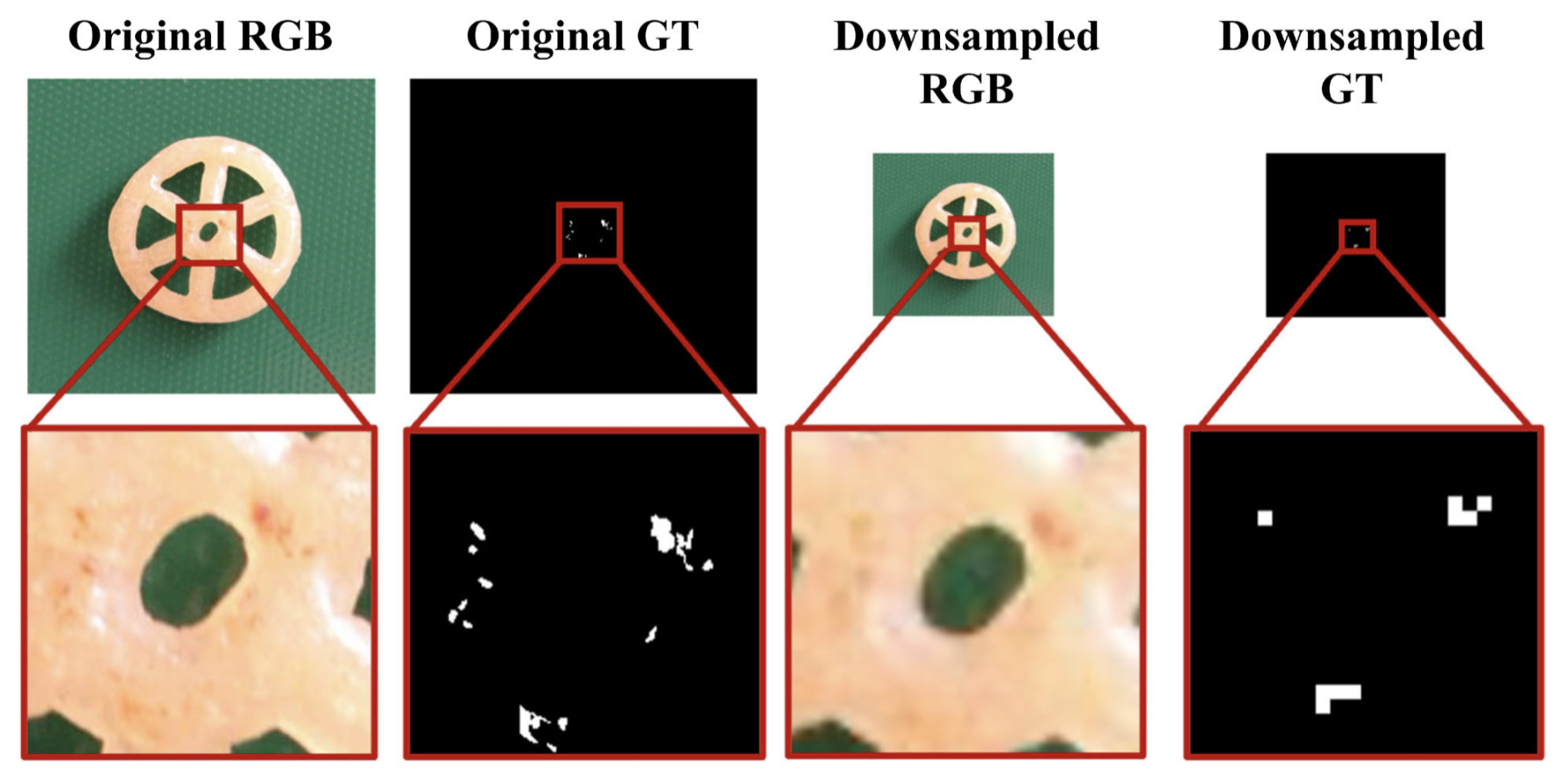
Booster: A Benchmark for Depth From Images of Specular and Transparent SurfacesIEEE Transactions on Pattern Analysis & Machine Intelligence, Dec 2024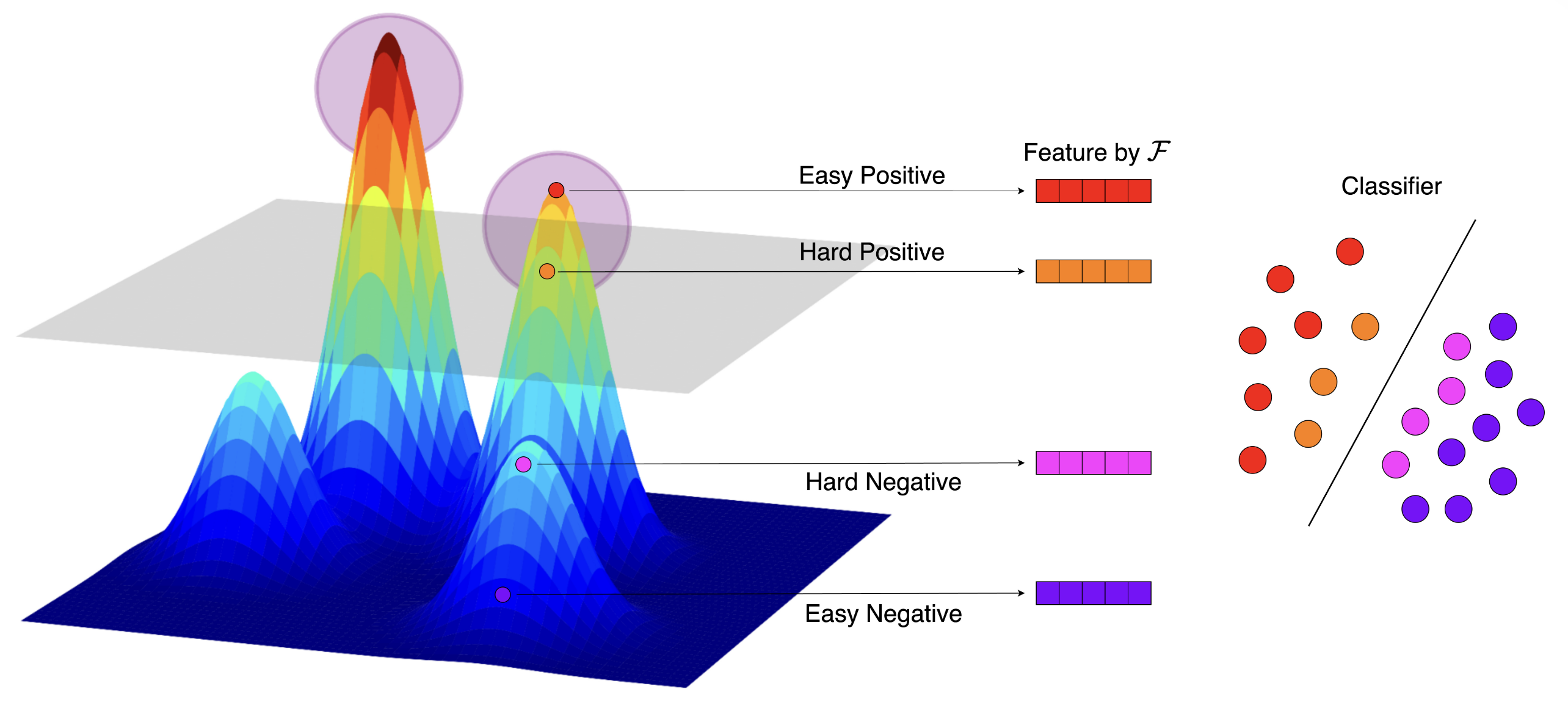 Test Time Training for Industrial Anomaly SegmentationIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Jun 2024
Test Time Training for Industrial Anomaly SegmentationIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Jun 2024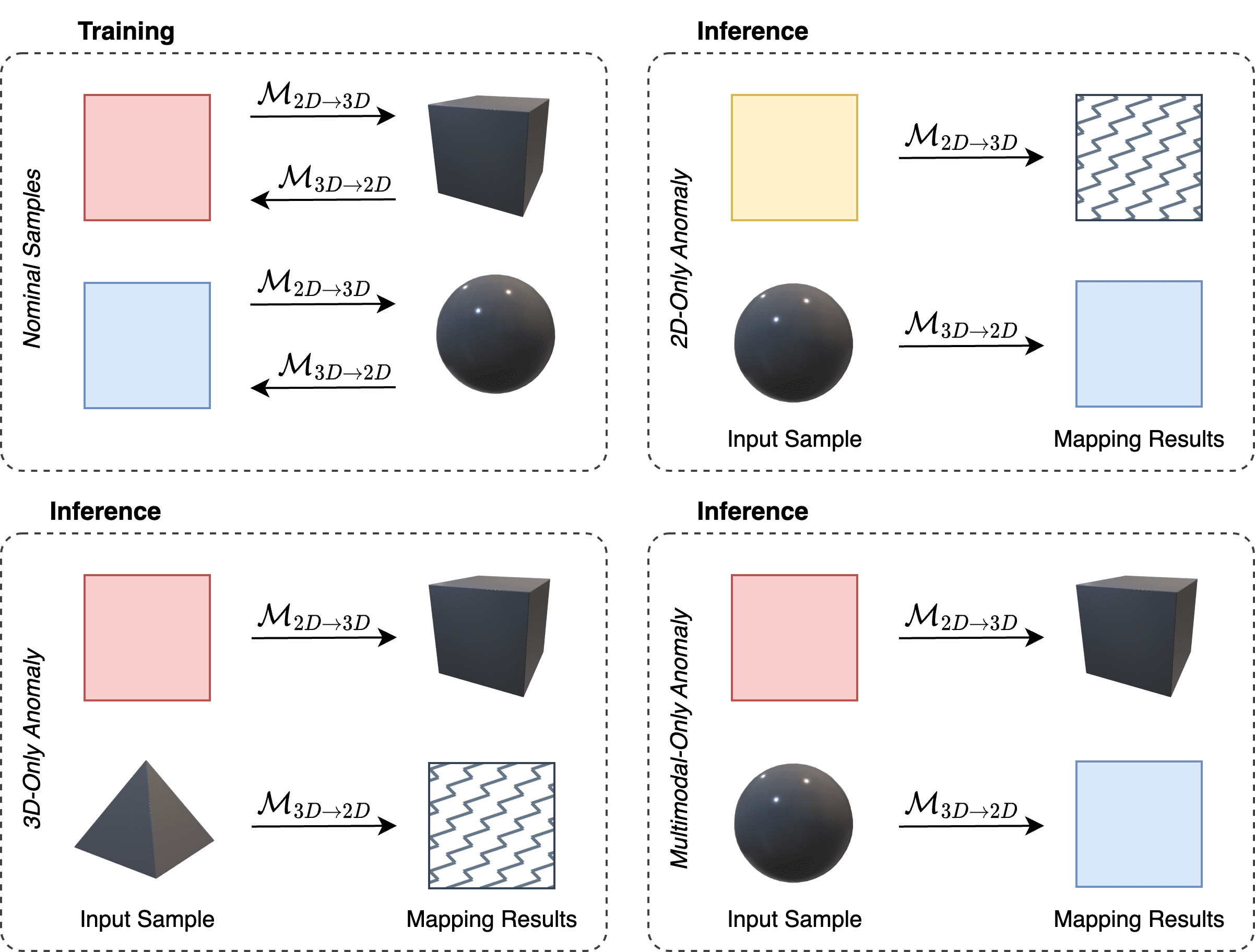 Multimodal Industrial Anomaly Detection by Crossmodal Feature MappingIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun 2024
Multimodal Industrial Anomaly Detection by Crossmodal Feature MappingIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun 2024


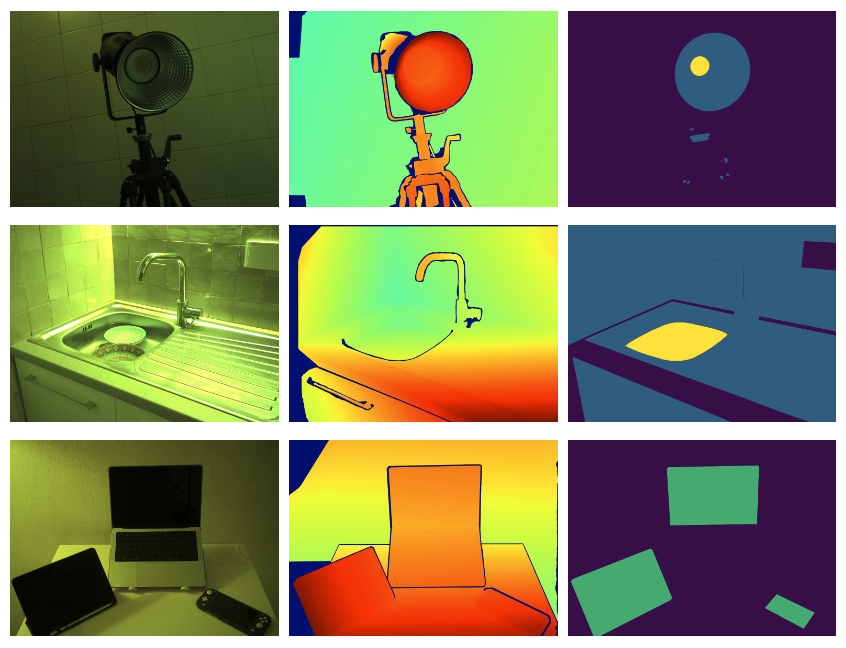
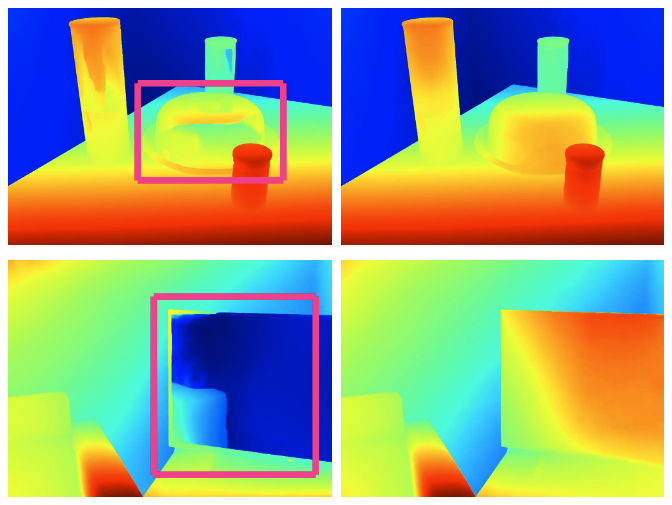 Learning Depth Estimation for Transparent and Mirror SurfacesIn The IEEE International Conference on Computer Vision (ICCV), Oct 2023
Learning Depth Estimation for Transparent and Mirror SurfacesIn The IEEE International Conference on Computer Vision (ICCV), Oct 2023
 Mitigating non-Lambertian surfaces issues in Stereo Matching with Neural Radiance FieldsJun 2022
Mitigating non-Lambertian surfaces issues in Stereo Matching with Neural Radiance FieldsJun 2022